
Key Concepts
Technology that can safely drive humans or goods to their destination without, or with less, human operation. Automated driving systems for cars, trucks, and buses will eventually be able to sense the environment and make human-like decisions, using an onboard computer, sensors, and communication with a data center or roadway. This article will focus on self-driving cars (Fig. 1). See also: Data communications
The levels of driving automation as defined by the Society of Automotive Engineers (SAE) International are listed in the table. If the classification is level 3 or higher, then the system is considered an automated driving system.
| Level of automation | Description |
|---|---|
| Level 0: No automation | The driver completely controls the vehicle at all times. |
| Level 1: Driver assistance | Either the lateral (steering) or the longitudinal (speed) control of vehicle motions is automated, while the driver does the rest. |
| Level 2: Partial automation | Both lateral and longitudinal motion control are automated simultaneously, such as adaptive cruise control in combination with lane keeping, while the driver supervises continuously and looks out for hazards that the system cannot recognize. |
| Level 3: Conditional automation | The driver can cede control of driving in certain conditions. The system senses when conditions require the driver to retake control and alerts the driver to do so. |
| Level 4: High automation | The system performs all driving functions within a prescribed set of conditions (location, road class, traffic, weather, and lighting). The driver does not need to control the vehicle while those conditions are satisfied, so the vehicle could therefore operate without any person onboard under those conditions. |
| Level 5: Full automation | The system can do the driving under all circumstances in which humans are capable of driving. Human users can still decide whether they prefer to do the driving. |
Key technologies of automated driving
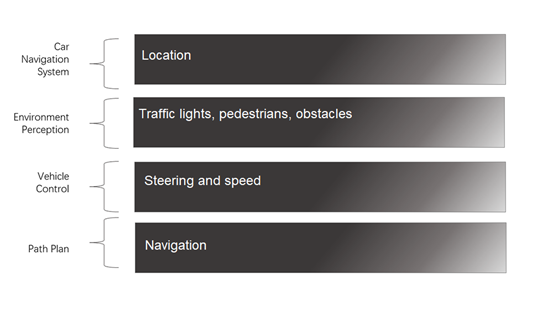
In an automated driving system, onboard automatic devices replace human functions in driving. Therefore, according to the functional requirement of human driving and the modules of onboard equipment, the key technologies of automated driving can be divided into four parts as shown in Fig. 1. These are navigation, environment perception, vehicle control, and path planning.
Navigation
The navigation system uses a number of advanced technologies, including geographic information systems (GIS), the Global Positioning System (GPS), computer technology, and advanced communication technology. The main components of a navigation system are shown in Fig. 2.
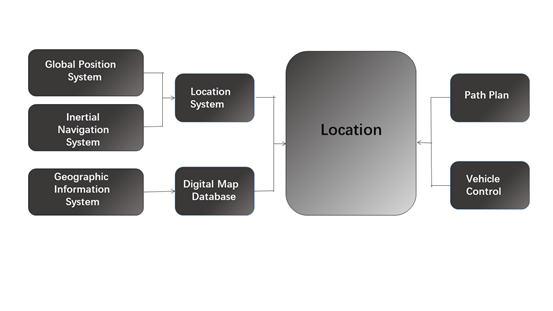
The navigation system in Fig. 2 includes two parts: the location system and the digital map database. The first problem for automated driving is that the vehicle must know its location. The technology a vehicle uses to determine its position is called the location system. The location system generates the information for locating the position of the vehicle. Location systems can be classified as relative, absolute, and hybrid.
Relative location systems calculate the vehicle’s position, speed, and direction of motion relative to a defined starting point. An inertial navigation system (INS) is a commonly used relative location system that measures the angular velocity and the acceleration of the vehicle using a gyroscope and an accelerometer, from which the distance and direction of the vehicle can be calculated by an onboard computer when combined with measurements of wheel rotations. See also: Accelerometer; Gyroscope; Inertial navigation system
Absolute location systems use an external signal to locate the vehicle’s position. One common approach is to use satellite positioning systems, such as GPS, GLONASS, Galileo, and China’s Beidou. See also: Satellite navigation systems
Relative location and absolution location systems, however, have their own faults. In the real world, hybrid location, which combines the two methods, is the common location method.
Besides the location system, another important technology is the digital map database. The map information in a digital map database includes road location information that can be matched with satellite position information, as well as more particular information such as geographical features, road conditions, buildings, traffic signs, and roadside facilities.
Environment perception
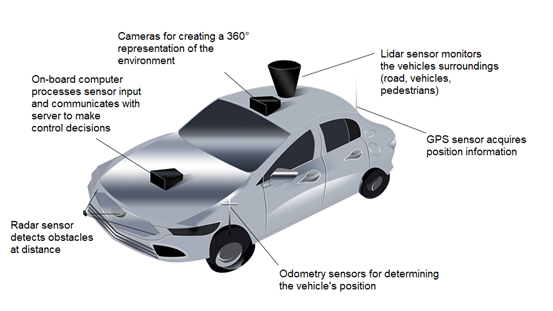
Environment perception is a key technology of automated driving that enables a vehicle to sense the surrounding environment. Environment perception involves road tracking, and obstacle detection and recognition. As shown in Fig. 3, an environment perception system generally has a laser-sensing system, a visual-sensing system, and radar ranging. In the future, roads might provide communication of environmental information to vehicles. At present, however, automated driving systems must have the ability to operate without such intelligence. Therefore, radar, laser-sensing systems, and visual-sensing systems are the key technologies that enable the vehicle to sense the environment. See also: Intelligent vehicles and infrastructure; Radar; Rangefinder
Current research is focused on building a representation of the environment based on data collected by lidar (light detection and ranging), a camera, or both, in a process known as simultaneous localization and mapping (SLAM). Lidar can match reflections off roadside objects with a “point cloud” of reflections collected in advance and obtain a 3D representation of the environment without being affected by ambient light, which is vital for the implementation of self-driving cars. A camera is much less expensive, but it requires more computing power to recognize objects and calculate distance; a camera is also much less accurate. Therefore, a key to automated driving is the system’s ability to reconstruct the environment based on data from multiple sensors. In addition, deep learning, a type of machine learning, is becoming mainstream for environment reconstructions. See also: Lidar; Machine learning
Vehicle control
Vehicle control includes commanding speed and direction of motion. One of many methods used for vehicle control employs a proportional-integral-derivative (PID) control algorithm to process sensor data. See also: Algorithm
Path planning
The function of path planning is determining the best route for the vehicle from an origin to a destination. Essentially, path planning is a problem of graph theory. Until now, this was an NP-hard problem (NP for nondeterministic polynomial time). To solve this problem, heuristic algorithms are a common method. Moreover, when a vehicle following the planned path is moving from origin to destination, it is required to predict motions of other moving objects in the road environment (vehicles, pedestrians, cyclists, animals) based on the available sensor data; then, it is required to avoid collision with those objects by dynamically updating the path. See also: Artificial intelligence; Graph theory
Issues and impacts
In addition to technical issues, some legal and regulatory issues need to be considered for the commercialization of automated driving systems. One legal issue is the licensing of a self-driving car. A second one is the division of responsibility when a crash occurs. There are also ethical issues. An automated driving system might have to choose among various collision targets in an emergency based on significant uncertainties in the data collected by its sensors. An example of a difficult choice might be when there is a cliff on one side of a road and a pedestrian on the other side, but not room for both or time to stop to avoid a collision with the pedestrian.
Although there are many obstacles remaining in the development of automated driving, it will most likely be realized in a gradual way. Nowadays, many new cars have level 1 assistance systems, and a few have level 2 partial automation. There are no level 3 systems yet (see table). Within the next decade, some level 4 systems will probably be introduced in limited, specialized applications, such as for low-speed urban transit shuttles, small package deliveries, and long-haul trucking.
Once realized, automated driving is likely to have a profound impact on human society beyond human beings being relieved of the driving task under some conditions. The four basic needs of human survival are food, clothing, shelter, and transportation. If level 4 automation is implemented, then it is conceivable that human material production will be greatly changed and improved. For agricultural production, automated equipment could help people sow, fertilize, and harvest crops. Therefore, the impact of self-driving car implementation on human beings would be epic. See also: Potential impacts of self-driving cars

